
SCENECT is a free tool from FARO to capture 3D point cloud of objects and environments. There are several other tools for the similar 3D capture, and the choice depends on the goals. In this case the main goal is the capture house layout with furniture into a 3D model.
Plus:
- can capture color together with depth data
- some free tools are missing that option
- several export formats, ie. color can be preserved
- alignment option (registration) within and between recordings
- many free tools are missing that option
- frames can be excluded or included
- many free tools are missing that option
- adjust capture depth to exclude background
- many free tools are missing that option
- distance measurements
- recording into a file for later processing
- many free tools are missing that option
Minus:
- Requires good processing capacity (memory, CPU, video card, USB, hard drive)
- Some learning curve
- for static targets only (ie. not for rotating objects)
- For some cases, ie. using other 3D tools for posprocessing, better controlled frames generation with image captures would be helpfull
- Colors get easily mixed when recording has frames slightly misaligned
- ie. 3D points (voxels) with different colors are overlapping
- This is more the capture technology issue rather than tool issue
Requirements:
- Kinect, which contains 3D depth sensors (infrared projector and camera) and RGB camera
Please note
-
post-processing of point clouds requires pacience and special 3D skills. Typically there are separate tools for 3D capture and 3D post-processing.
-
The tool tries to calculate the camera position, and sudden camera movements and computer “lags” can cause slight mismatches in positions
-
For capturing with color, try to avoid too much looping (ie. recording the same scene)
-
For capturing with color, select the best matching frames
-
For capturing with color, one might need heavy post processing
-
ie. splitting the scenary (layout) into smaller pieces and joining them later in 3D tool
-
ie. possibly needing to take separate photos to create photo textures in 3D tool
-
Transferring captured object into 3D program
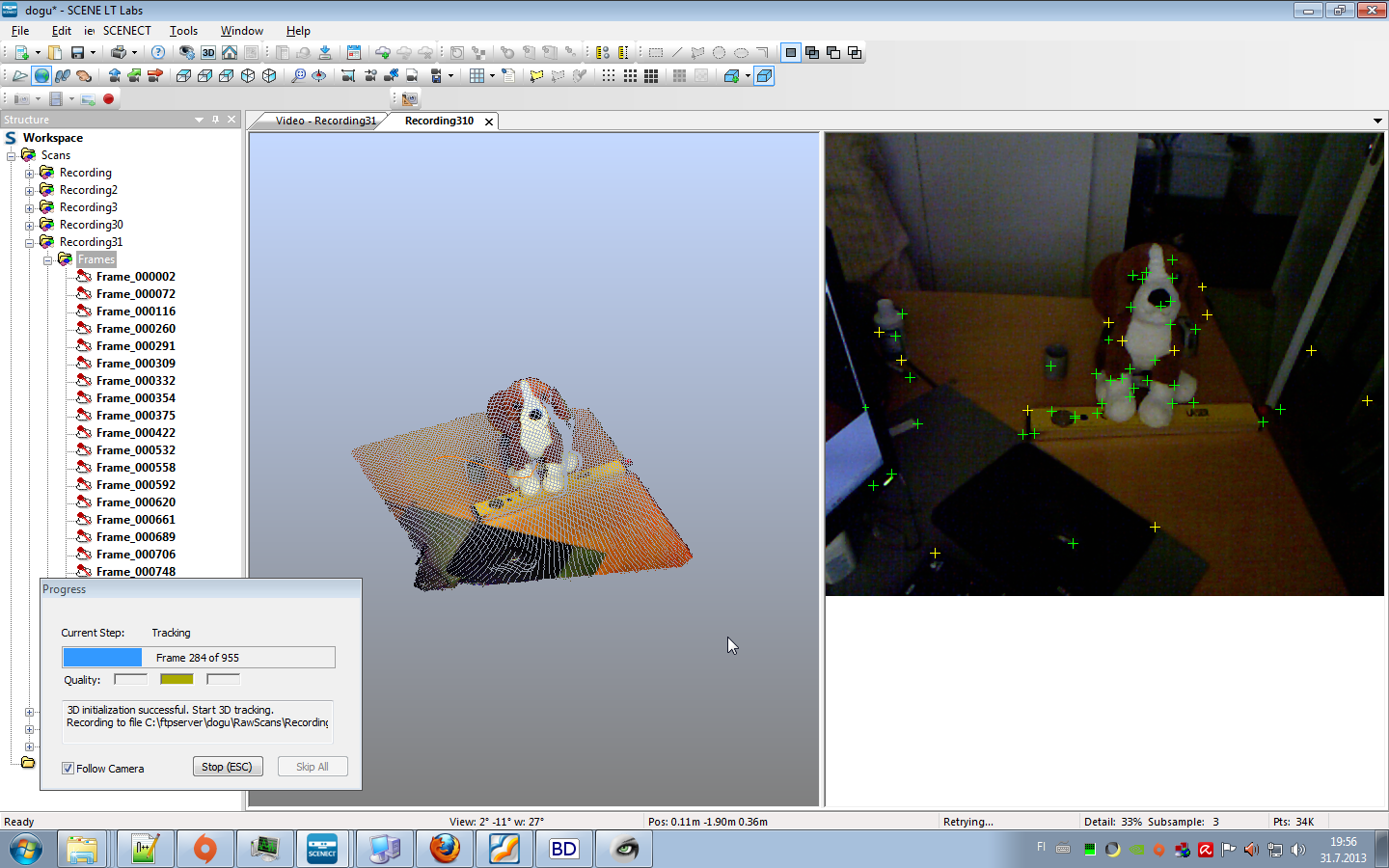
The 28cm high toy dog was captured with SCENCT. The ruler under the dog is 40 cm. At this point in time, the color on the dog face looks good. However, when moving the kinect around the dog, a slight mimatch occured, which caused not good looking color mixing. It is a challenge to try to capture this small objects with kinect, and to keep track on the camera (kinect) position accurately. Any slight mismatch in position causes a color mismatch.
However, for capturing house layouts the slight mismatch is not disturbing.
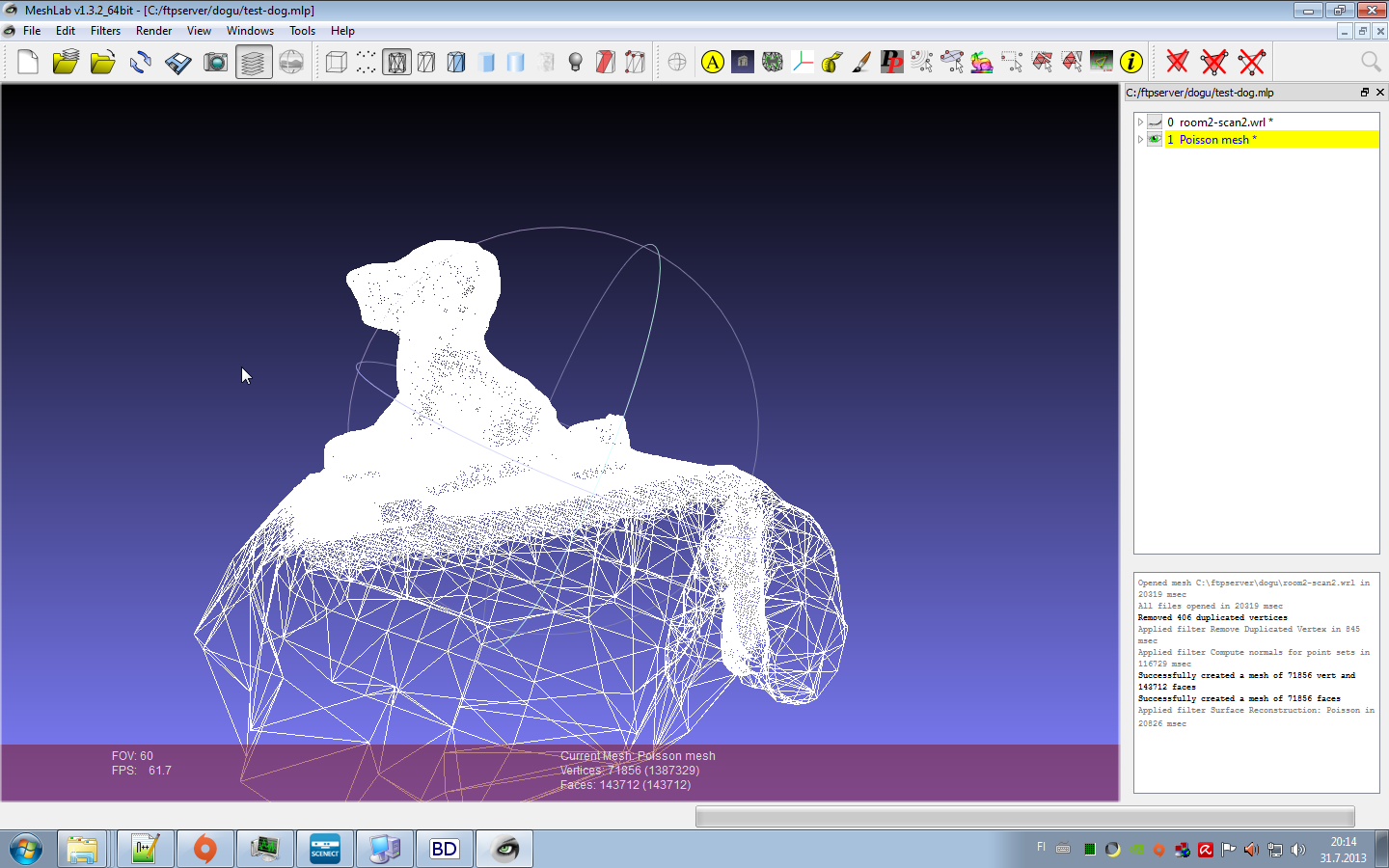
The captured scene was transferred as pointset (pointcould) in wrl format into Meshlab .
The dog object was extracted from the imported pointset.
In meshlab, surface (mesh) was generated from the pointset, extra mesh deleted and exported as obj into a file.
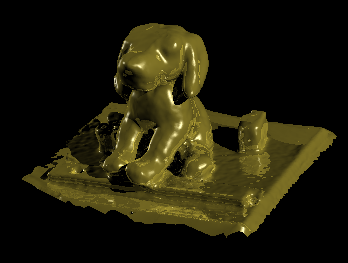
The obj was imported into Art of Illusion 3D program, where golden texture was added into it. (I was not able to create the original texture using Meshlab and SCENECT image captures. To do this in meshlab is not “that ” easy)
Links
- For capturing 3D objects with line laser, please see David Laserscanner.
- For capturing 3D objects with photos, please see VisualSFM